Research Article - Biomedical Research (2018) Volume 29, Issue 12
Modelling of dolphin clicks and its performance analysis compared with adaptive equalizer in ocean environment
N R Krishnamoorthy1*, C D Suriyakala2, M Subramaniom1, R Ramadevi1, D Marshiana1 and Sujatha Kumaran1
1Sathyabama University, Chennai, Tamil Nadu, India
2ECE Department, Sree Narayana College of Engineering, Kerala, India
Accepted on March 10, 2017
DOI: 10.4066/biomedicalresearch.29-16-2311
Visit for more related articles at Biomedical ResearchAbstract
In the past two decades, dolphins have been used for analyzing the parameters of ocean like salinity and depth. For reliable communication in ocean environment, advanced techniques like Orthogonal Frequency Division Multiplexing (OFDM), Adaptive Equalizer and Turbo Codes are used, but these are still in lack of data security. Vocalizations done by dolphins are special one because of its unique frequency and more secure in terms of communication. Hence in this paper, dolphin clicks are modelled and data transmission is carried out in underwater channel. The observed result used in the under communication field was compared with adaptive equalizer technique and performs better. A sample MRI image is also passed through the channel and received back with minimal error rate.
Keywords
Vocalization, Dolphin clicks, Underwater acoustic channel, Dolphin communication, Adaptive equalizer, Bit error rate, Signal to noise ratio.
Introduction
Underwater Acoustic channel is the most difficult channel for the secure and reliable data transmission. The various factors that affect the performance of UAC are Multipath Spreading, Ambient Noise, Attenuation and Doppler Shift. Vocalizations by the dolphins are the low frequency signal which lies in the range of the 1 to 20 kHz. For secure and long range communication, the data are modelled by the low frequency Dolphin clicks and transmitted over the channel. For ocean environmental monitoring, a covert communication link was established between Unmanned Underwater Vehicles and server [1]. To evaluate UAC performance, Direct Sequence Spread Spectrum (DSSS) technique is adopted in a static platform [2]. A pair of detectors which are insensitive to the variation of phase are used and obtained a low Error Rate with low Signal to Noise Ratio (SNR) value of -10 dB on a sea data [3,4]. Differential Phase Shift Keying and DSSS techniques [5,6] are applied to investigate the covert UAC performance. Both the techniques use a RAKE receiver, a type of receiver to encounter the fading effects for the estimation of the error rate.
A successful communication was examined in the covert underwater communication [7,8] for the acoustic telemetry using Orthogonal Frequency Division Multiplexing (OFDM) Technique. Bandwidths of 3.6 kHz are utilized by the 16 sub bands for the data transmission rate of 42 and 78 bits/sec. In Baltic Sea, OFDM with Turbo Code [9,10] are tested in three different channels and achieved a low SNR. All these techniques have not provided much security as requested. One can detect the presence of signals using long time integration technique. To overcome these difficulties, Dolphins clicks are used as carrier signal for data transmission to obtain better Bit Error Rate (BER).
Materials and Methods
For communication under ocean environment, dolphin uses vocal and non-vocal signals. Dolphin behaviours can be categorized by various vocalizations such as Signature Whistle, Excitement, Genital Buzz, Squawk, Scream, Bark and Synchronized Squawks. Vocalization and behaviour of captive dolphins were reported in [11,12] and bottlenose dolphins in [13,14].
Signature Whistles is the simplest vocalizations used in reunion of the mother and calf dolphins, and for parental care. During this vocalization, bubbles are expelled from the blowhole along with Tail-slapping action. Excitement vocalization is the combination of Signature whistle and burst pulsed sound. This happens when the dolphins swim and emit bubbles continuously. Under genital buzz behaviour dolphins retrieve their calves or genital inspection. During this behaviour, dolphin swim inverted and contact the calf’s flank. Male dolphin approaches the female using this behaviour of vocalization in an exaggerated S-posture.
During bouts of aggressive behaviour and sexual play, dolphin does the Squawks. This includes the body charges, circling motions like figure eight, open mouth behaviour and head to head orientation. Male dolphin uses burst pulsed signals for coordinating the swimming behaviour and young males one shows only partial coordination to show their escalated aggressive activity, which is referred as synchronized squawks. Screaming activity happens when ten or more male dolphins are spotted in one place.
It consists of frequency modulated whistles ranging from 5.8-9.4 kHz. This can happen either in Intraspecific or Interspecific. Dolphins’ barking is same as screams behaviour. The difference is, in screaming, high frequency signal in the range of 2.5 to 9.4 kHz is used whereas in barking low frequency signal in the range of 0.2 to 2 kHz signal is used by the dolphins. Table 1 list the dolphin vocalization frequency range in the order of kHz and the pulse duration in terms of seconds.
| S No | Vocalization | Frequency Range (in kHz) |
Pulse Duration (in Seconds) |
|---|---|---|---|
| 1 | Signature Whistle | 4 to 18 | 0.5 to 8 |
| 2 | Excitement | 4 to 18 | 2 to 30 |
| 3 | Genital Buzz | 1.2 to 2.5 | 6 to 20 |
| 4 | Squawk | 0.2 to 12 | 0.2 to 1 |
| 5 | Scream | 5.8 to 9.4 | 2.5 to 4 |
| 6 | Bark | 0.2 to 2 | 0.5 to 1 |
| 7 | Synchronized Squawks | 0.1 to 15 | 0.9 to 1 |
Table 1. The frequency range and the pulse duration of the dolphin vocalization.
Dolphin clicks can be modelled using double down chirp signal [15,16]. Two chirp signals are considered and the frequency bands of the selected signals are between 1 and 20 kHz. This is exactly the same as the dolphin vocalization frequency range. The first chirp signals are taken between 1 and 12 kHz and delayed second one is between 8 and 20 kHz. The expression of the modelled clicks is in the form of
S(t)=w1p1(t)+w2p2(t-τ) → (1)
Where
w-Window function
p(t)-first derivative of the Gaussian waveform and it is expressed as

Where,
A-Pulse Amplitude, t-Time duration, τ-Attenuation constant.
The bandwidth of the above equation is calculated using 3 dB lines and found that it lies between 1 to 20 kHz. In underwater channel, the major factor which affects the performance of any coding techniques is the Inter Symbol Interference (ISI). ISI happens, when the delayed version of the sample, interfere with other samples in receiver side. To overcome this, Adaptive equalizers are used in the communication channel which provides the better BER also. Equalizers are classified as Present, Adaptive and Maximum Likelihood Sequence Estimation (MLSE) equalizer. Present equalizers are the one which assumes, channel is time invariant and find transfer function of the channel H(f), whereas in the case of Adaptive and MLSE equalizers, channel is taken as time variant.
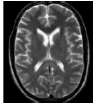
A sample MRI image is taken and read using MATLAB toolbox. It consists of unsigned integer with 237 rows and 212 columns [17]. These integers are converted into binary and reshaped into single rows. The binary data is encoded using dolphin clicks and allowed to pass through the channels. For simulation purpose, four different channels are considered with following specifications. Channel 1 and 2 are short distance communication in which transmitter and receiver are separated by distance of 100 meters. For Channel 3 and 4, the distance between the transmitter and receiver is 1000 meters. Channel 1 and 3 has no Doppler spread and channel 2 and 4 has Doppler shift of 3 × 10-4.
Results and Discussion
The optimal step-size of an equalizer is calculated using iteration method. A random data is generated using MATLAB and modulated using Phase Shift Keying (PSK). The impulse response of the channel is convolved with the modulated data and allows passing through the channel. In the receiving side, an equalizer is used to decode the data and demodulated using PSK.
In the equalizer, the step-size is varied from 0 to 1 with an increment of 0.01 and the corresponding error rate is calculated for all the four different channels. The step-size which gives minimum error rate is referred as the optimal step-size. It is found that equalizer gives a BER in the order of 10-3 over a range of step-size for short range channels and 100 percent reception of data for channel 3 and 50 percent reception of data for channel 4. The optimal step-size values and corresponding error rates for all the channels are listed in the Table 2.
| Channel 1 | Channel 2 | Channel 3 | Channel 4 | ||
|---|---|---|---|---|---|
| LMS | Stepsize range | 0.2 to 0.34 | 0.06 to 0.22 | 0.01 to 0.18 | 0.43 to 0.45 |
| Optimal Stepsize | 0.27 | 0.14 | 0.095 | 0.465 | |
| BER | 0.003 | 0.001 | 0 | 0.423 | |
| Signed LMS | Stepsize range | 0.11 to 0.12 | 0.06 to 0.08 | 0.02 to 0.05 | 0.43 to 0.44 |
| Optimal Stepsize | 0.115 | 0.07 | 0.035 | 0.435 | |
| BER | 0.006 | 0.001 | 0 | 0.417 | |
| Normalized LMS | Stepsize range | 0.68 to 1 | 0.22 to 1 | 0.08 to 0.5 | Any |
| Optimal Stepsize | 0.84 | 0.61 | 0.29 | Any | |
| BER | 0.002 | 0.001 | 0 | 0.5 | |
Table 2. Calculation of optimal step-size for the channel 1 to 4.
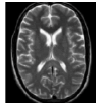
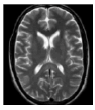
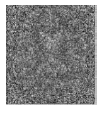
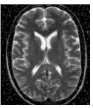
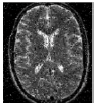
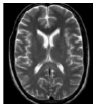
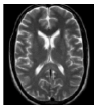
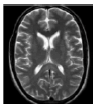
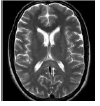
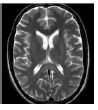
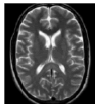
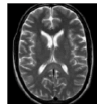
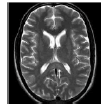
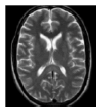
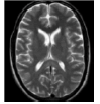
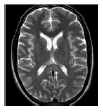
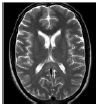
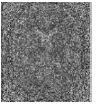
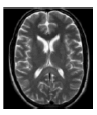
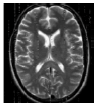
For MRI image processing in UAC, an optimal step-size determined using Table 2 is taken and equalizer is designed. The image is first converted into binary data, coded using Dolphin clicks. Then it is modulated using PSK and pass through the channels. The image in the receiving end is obtained after demodulation process. Table 3 shows the error rate of all channels using equalizer and dolphins clicks with two EbNo values of 5 and 20.
| LMS | Signed LMS | Norm LMS | MLSE | DC | ||
|---|---|---|---|---|---|---|
| EbNo=5 | Channel1 |  |
 |
 |
 |
 |
| BER=0.493 | BER=0.45 | BER=0.462 | BER=0.089 | BER=0.008 | ||
| Channel2 |  |
 |
 |
 |
 |
|
| BER=0.444 | BER=0.44 | BER=0.367 | BER=0.0065 | BER=0.0074 | ||
| Channel3 |  |
 |
 |
 |
 |
|
| BER=0.406 | BER=0.048 | BER=0.023 | BER=0.006 | BER=0.0002 | ||
| Channel4 | 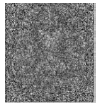 |
 |
 |
 |
 |
|
| BER=0.501 | BER=0.482 | BER=0.21 | BER=0.3718 | BER=0.0078 | ||
| EbNo=20 EbNo=20 | Channel1 |  |
 |
 |
 |
 |
| BER=0.004 | BER=0.009 | BER=0.002 | BER=0 | BER=0 | ||
| Channel2 | 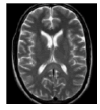 |
 |
 |
 |
 |
|
| BER=0.001 | BER=0.001 | BER=0.001 | BER=0 | BER=0 | ||
| Channel3 | 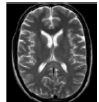 |
 |
 |
 |
 |
|
| BER=0.001 | BER=0.003 | BER=0.001 | BER=0 | BER=0 | ||
| Channel4 | 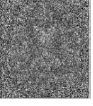 |
 |
 |
 |
 |
|
| BER=0.49 | BER=0.47 | BER=0.001 | BER=0.0272 | BER=0 |
Table 3. Comparison of Adaptive Equalizer BER value with Dolphins communication for different EbNo value.
Conclusion
It is concluded from the Table 3 that the channel with Doppler shift (Channel 2 and 4) is not giving clear image as compared to the channel without Doppler shift (Channel 1 and 3). It is also clear that data communication using Dolphins clicks are able to reproduce the transmitted image 100 percent with high EbNo of 20 which cannot be obtained using the equalizer. Even with low EbNo value of 5, Dolphin communication can produce an error rate in the order of 10-3 as low as compared to other techniques.
References
- Walree PV, Ludwig T, Solberg C, Sangfelt E, Laine GA, Bertolotto. UUV covert acoustic communication. Proceedings UAM 2009.
- Yang TC, Yang WB. Performance analysis of direct-sequence spread-spectrum underwater acoustic communications with low signal-to-noise-ratio input signals. J Acoust Soc Am 2008; 123: 842-855.
- Yang TC, Yang WB. Low probability of detection underwater acoustic communications using direct-sequence spread spectrum. J Acoust Soc Am 2008; 124: 3632-3647.
- Qu F, Yang L, Yang TC. High Reliability Direct-Sequence Spread Spectrum for Underwater Acoustic Communications. Oceans 2009; 1: 802-807.
- Ling J, He H, Li J, Roberts W, Stoica P. Covert underwater acoustic communications. J Acoust Soc Am 2010; 128: 2898-2909.
- Ling J, He H, Li JA, Robert W, Stoica P. Covert underwater acoustic communications: transceiver structures, waveform designs and associated performances. Oceans 2010.
- Leus G, van PAW. Multiband OFDM for covert acoustic communications. IEEE J Select Areas Commun 2008; 26: 1662-1673.
- Leus G, van PW, Boschma J, Fanciullacci C, Gerritsen H, Tusoni P. Covert underwater communications with multiband OFDM. Oceans 2008; 1: 391-398.
- Van P, Walree, Sangfelt E, Leus G. Multicarrier Spread Spectrum for Covert Acoustic Communications. Oceans 2008; 1: 264-271.
- Van PA, Walree, LeusG. Robust Underwater Telemetry with Adaptive Turbo Multiband Equalization. IEEE J Ocean Eng 2009; 34: 645-655.
- Caldwell MC, Caldwell DK. Vocalization of naive captive dolphins in small groups. Science 1968; 159: 1121-1123.
- Puente AE, Dewsbury DA. Courtship and copulatory behavior of bottlenosed dolphins (Tursiops truncatus). Cetology 1976; 21: 1–9.
- Connor RC, Smolker RA, Richards AF. Two levels of alliance formation among male bottlenose dolphins (Tursiops sp.). Proc Natl Acad Sci U S A 1992; 89: 987-990.
- Schultz KW, Cato DH, Corkeron PJ, Bryden MM. Low frequency narrow-band sounds produced by bottlenose dolphins. Mar Mamm Sc 1995; 11: 503-509.
- Houser DS, Helweg DA, Moore PW. Classification of dolphin echolocation clicks by energy and frequency distributions. J Acoust Soc Am 1999; 106: 1579-1585.
- Capus PY, Brown K, Lane DM, Moore PW, Houser D. Bio-inspired wideband sonar signals based on observations of the bottlenose dolphin (Tursiops truncatus). J Acoust Soc Am 2007; 121: 594-604.
- http://www.oasis-brains.org/